Do I Need a UBEC for My PixHawk to Canon Trigger Cable to Work? |
 |
OverviewThis really only applies to copters since airplane ESCs contain BECs (Battery Eliminator Circuit) to power servos. Coptors don't usually have any servos, so the ESCs don't need to provide power for servos. CHDK enabled Canon Powershot cameras require a 5 volt pulse in order to take a picture. Pixhawk autopilots are 3.3 volt systems. When configured for triggering a camera by distance they provide a 3.3 volt pulse to the signal pin you specify. Problem is, 3.3 volts won't actually trigger the camera. You need 5 volts.
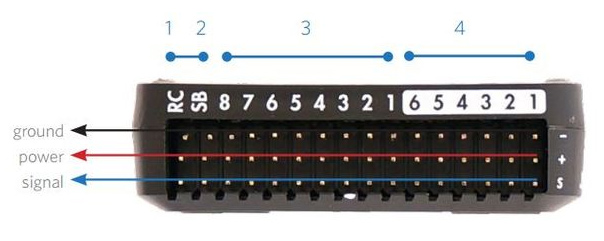
By default there is no power on the power pin rail. Only the signal pins are unique. The power and ground pins seen above are common. If you provide 5 volts to one of the power pins, all power pins will have 5 volts. The Pixhawk to Canon Trigger Cable uses a transistor to substitute the 5 volts from the power pin when 3.3 volts is sent to the signal pin. Check your system for 5 volts
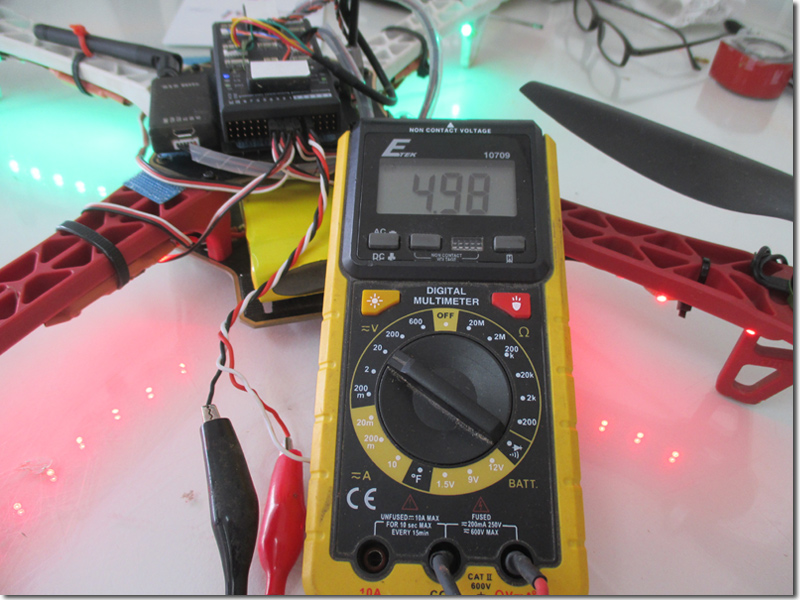
Connect a donor servo extension to any port on the back of the Pixhawk. Connect the red and black wires to a volt meter. Check for 5 volts. This copter shows 5 volts because it's using airplane ESCs. Remember, the power rail is common, so if any of the ESCs have a BEC and are providing 5 volts to the rail, the whole rail will have 5 volts. What if I don't have 5 volts?Then you will need to connect a BEC to any open port on the back of the Pixhawk.
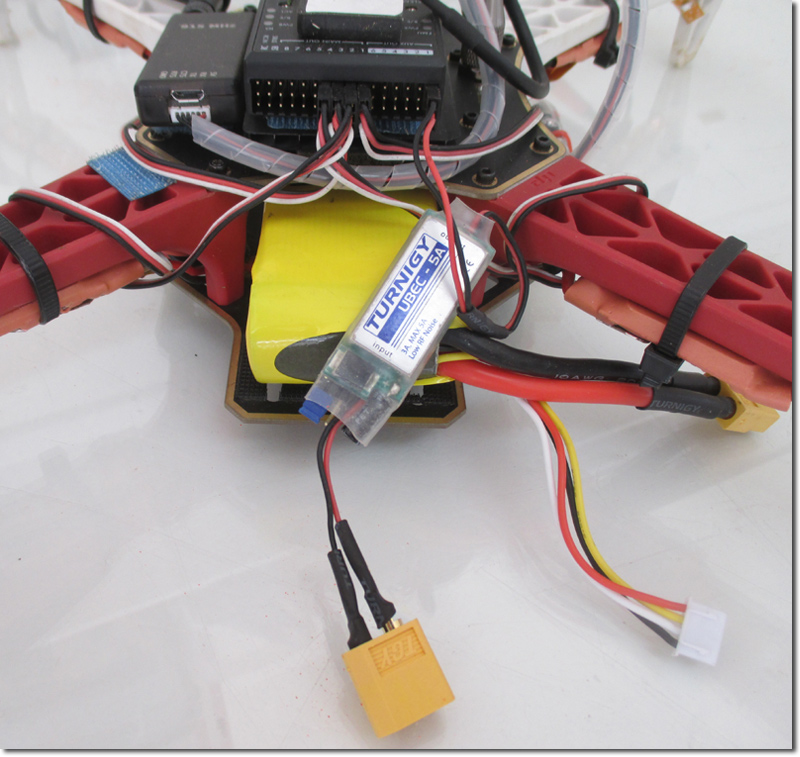
Great, so where does the end with the HXT60 connector go? Good question. Wherever you can find battery power.
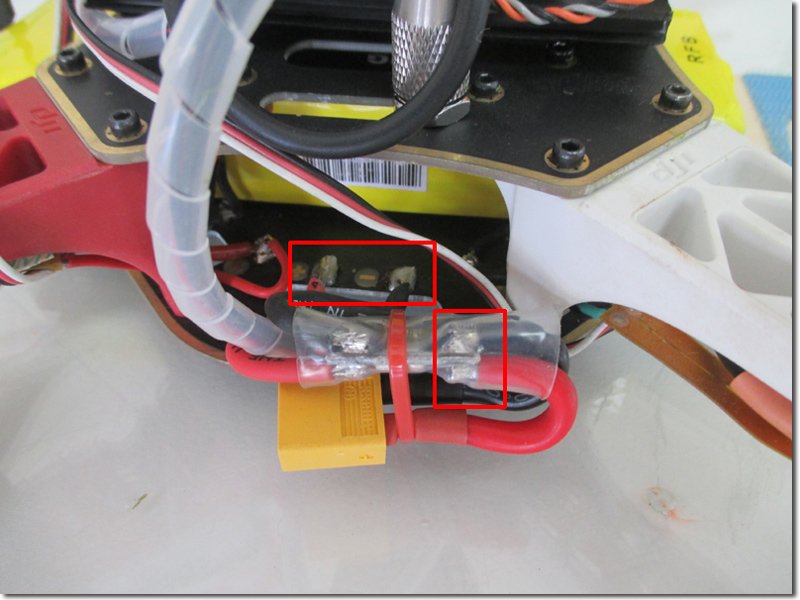
Two options shown above are the copter's power distribution board or directly to the voltage monitor. Also, many coptor power distribution boards already have a 5 volt out. In that case you can just run a single wire from the + 5 volt out to any power pin on the back of the pixhawk.
Errata, kudos, brian.christal@gmail.com
|
 |